-
117
-
2025-08-01 10:37:48
1. Working Principle of a Starter Motor
1.1 Basic Electromagnetic Principles
1.2 Starter Motor Characteristics
1.3 Complete Operation Process
2. Key Design Points for Starter Motors
2.1 Design Input: Clarify Starting Requirements
2.2 Core Parameter Design
mportant;"> Based on the input requirements, calculate the key parameters of the motor:
mportant;"> 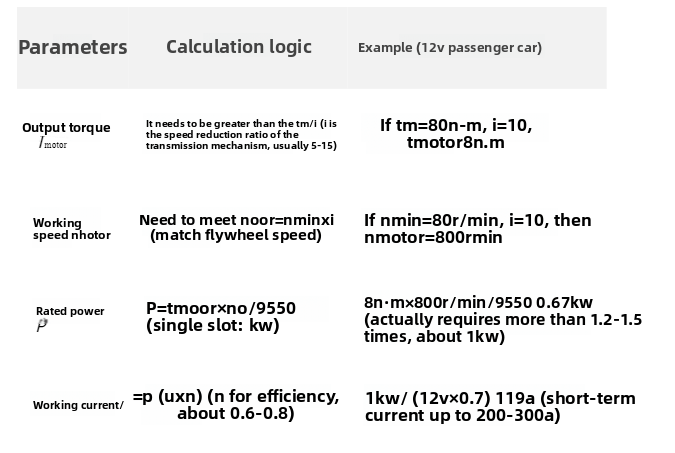
2.3 Design of Key Components
(1) DC Motor Design
(2) Transmission Mechanism Design
(3) Control Device Design
2.4 Reliability and Environmental Adaptability Design
click 117Reply 0
Original post
2025-08-01 10:37